بازار ربات های پرنده غیر نظامی به یکی از بازارهای پر رونق در اروپا تبدیل شده است.
بخشی که فرصت های فوق العاده برای کارآفرینان هم فراهم کرده و دارای ظرفیت ایجاد ده ها هزار عنوان شغل است. ربات های پرنده غیرنظامی ظرفیت بالقوه زیادی برای کاربردهای نوآورانه در بخشهای مختلف دارند اکثر این کاربرد ها توسط ربات های پرنده کوچک محقق می شوند.
و فناوری آنها توسط شرکتهای کوچک و نوظهور تولید میشوند در کنار این پتانسیل ها نگرانی های متعددی هم در زمینه تولید و استفاده از ربات های پرنده مطرح است.
هدف ما معرفی کاربرد ها فرصت ها و موانع استفاده از ربات های پرنده در کسب و کارهای قدیمی و جدید است و در آن تلاش شده تا حد امکان به چشم انداز و دورنمای آینده ربات های پرنده پرداخته شود.
پهپادها و ربات های پرنده نشان می دهند که این سیستم ها با قابلیت ناوبری خودکار و امکان نصب تجهیزات مختلف بر روی آنها به عرصه های مختلف فعالیت های تجاری راه یافته اند و حتی کسب و کارهای جدید بر پایه این فناوری شکل گرفته است.
برای مثال طی چند سال اخیر کمپانی های خرده فروشی آنلاین و شرکت های پست و توزیع کالا پروژه هایی را برای عملیاتی کردن ارسال و تحویل کالا با ربات پرنده اجرا نموده اند.
پیشگام همه این کمپانیها، آمازون برای نخستین بار پروژه ارسال کالا از طریق ربات پرنده را معرفی نمود.
افزایش سرعت ارسال ، کاهش هزینه ، بالا رفتن سطح رضایت مشتریان و کاهش گازهای گلخانهای از مزیت های بالقوه ای است که آمازون در این پروژه دنبال نموده است.
این شرکت در مقابل ، نیاز به وضع قوانین و مقررات ، نیاز به تعیین مسیرهای حرکت استاندارد ، لزوم حفظ حریم شخصی ، نیاز به زیرساختهای فنی مانند ایستگاه های شارژ مجدد ، آموزش و فرهنگ سازی عمومی را از جمله چالشهای جدی استفاده از رباتهای پرنده در امور شهری و تجاری میداند.
این موارد نشاندهنده ضرورت انجام پژوهش های کاربردی از این دست در داخل کشور می باشد تا این فناوری را مطابق با اقلیم فرهنگ و نیاز جامعه امروزمان سازماندهی و مورد استفاده قرار دهیم و جهانیان عقب نمانیم.
اهمیت پرداختن به این موضوع مهم و ناشناخته بودن این پدیده در ایران و جهان است استفاده از ربات های پرنده در زمینه های مختلف در سالهای اخیر بسیار گسترش و رواج یافته است.
آمار رسمی موسسه گارتنر حاکی از فروش بیش از ۳ میلیون فروند پهپاد با مصارف شخصی و غیر نظامی در سطح دنیا در سال ۲۰۱۷ بوده است. در کشورمان آمار دقیقی مشاهده نشده است زیرا شاهد پرواز این پرنده ها توسط اشخاص مختلف بوده ایم.
با توجه به ورود این وسیله به کشورمان لازم است که ابعاد مختلف این پدیده نوظهور را بشناسیم.
معرفی


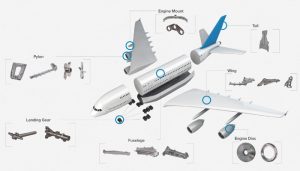
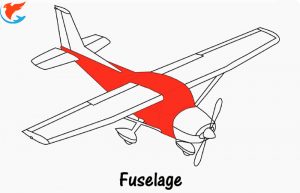
تعریف ربات پرنده به علت تنوع ویژگی ها پیچیده است به طور کلی توافق میشود که ربات پرنده دستگاههایی هستند که قادر به پرواز پایدار هستند بدون آنکه انسانی درون آنها باشد و تحت کنترل کافی قرار دارند تا کارکرد مفیدی را انجام دهند.
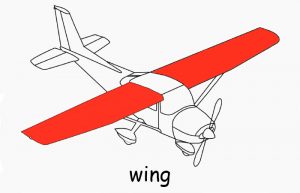
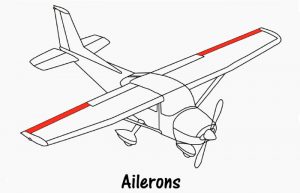
امروزه انواع مختلفی از پرنده های بدون سرنشین مانند بالهای ثابت هلیکوپترها و مولتی روتور ها در دسترس هستند با ثابت می تواند مسافت های بزرگی را با حداکثر سرعت پوشش دهد،اما محدودیت های دینامیکی آنها مانند منافع پذیری آنها را محدود میکند و برای برنامه های خاص مناسب نیستند.
مولتی روتور ها همان همانطور که از نامش پیداست شامل تعداد زیادی از روتور است حرکت روتور ها یک رانش و همچنین شتاب به بدنه مولتی کوپتر ایجاد می کند.
در مقایسه با مکانیزم بال گردان سقفی متغیر که در هلیکوپتر دو روتوره استفاده می شود این سیستم بالگردان ثابت اثربخشی بیشتری در سهولت و کنترل پرواز و حفظ ثبات دارد.
پارهای از کاربردهای این نوع رباتها پرنده طراحی شده عبارتند از:
پرواز بر فراز مناطق عملیاتی و جمع آوری اطلاعات ، کاربرد در عملیاتهای امداد ، حضور در مناطق آلوده ، استفاده در ماموریت های شناسایی ، تصویر برداری از تحرکات دشمن در دریا و سواحل ، اجرای عملیات انتحاری که ربات پرنده مولتی کوپتر می تواند انجام دهد.
ویژگی های اصلی این ربات ها در مقایسه با سایر وسایل پرنده می توان به مواردی مانند:
مصرف انرژی پایین ، امکان پرواز در ارتفاع بسیار کم، امکان بلند شدن و فرود روی مساحت های بسیار محدود شبه عمود پرواز، قابلیت مانور بالا ، مشاهده مشابهت حرکت با پرندگان، عدم جلب توجه دشمن به دلیل پرواز بی صدا و طبیعی و قابلیت نصب دوربین، میکروفون و حسگرهای تشخیص مواد رادیو اکتیو و گازهای سمی بر روی آنها اشاره کرد.
نوآوری های اخیر در ربات های پرنده به ویژه در سخت افزار، نرم افزار و شبکه ها انجام شده است به عنوان مثال مواد کامپوزیتی سبک و سیستم های موقعیت یابی جهانی GPS پروازهای کارآمد را مقدور می سازد.
علاوه بر این باتری های لیتیوم به سرعت در حال بهبود هستند بنابراین روبات های پرنده می توانند مسافت بیشتری را با یک شارژ ، پرواز کنند.
در واقع نقص عمده در عملکرد ربات های پرنده ظرفیت محدود باتری است در حال حاضر با استفاده از باتری های لیتیوم یون در بیشتر ربات های پرنده تجاری زمان پرواز حدود ۳۰ دقیقه است و هواپیماهای غیر مجاز ماژولار برای شارژ مجدد بیش از یک ساعت خارج از سرویس خواهند بود.
طراحی ماژولار یا ماژولار بودن و طراحی رویکردی است که یک سیستم را به قسمت های کوچکتر به نام ماژول ها تقسیم می کنند که می توانند به طور مستقل ایجاد شوند و سپس در سیستمهای مختلف مورد استفاده قرار بگیرند.
معرفی معماری ماژولار در طراحی رباتهای پرنده چند مزیت عملیاتی در سیستم تحویل را فراهم می کند. ربات های پرنده ای که طراحی ماژولار با باتری قابل تعویض دارند همان طور که انتظار می رود از نظر آماده شدن عملکرد بهتری نسبت به ربات های پرنده با باتری های یکپارچه به نمایش می گذارد.
علاوه بر این از آنجا که مجموعه ای از انواع ربات های پرنده با قابلیت های متمایز برای انجام انواع مختلف وظایف تحویل ضروری است ، طراحی ماژولار می تواند حجم ناوگان کل را به لطف اشتراکگذاری ماژول ها کاهش دهد.
ناوبری خودکار را می توان با استفاده از GPS و سنسور واحد اندازه گیری اینرسی آی IMU به دست آورد.
سنسورIMUشامل شتاب سنج، ژیروسکوپ، مغناطیس سنج همگی با سه درجه آزادی می باشند تثبیت کننده پرواز کنترل حالت و عملکرد کنترل GPS با حالت های مختلف الگوریتم PID به دست می آید.
مزایا و کاربرد ها

برخی استفاده های غیر نظامی مفید رباتهای پرنده در صنایع مختلف شامل نظارت بر کشاورزی و سمپاشی محصول،نظارت بر کوسه ها در سواحل ، نظارت بر حیات وحش برای حفاظت از محیط زیست ، نظارت بر آتش سوزی تحقیق و اکتشافات علمی نظارت بر شورش و مرزهای بین المللی توسط پلیس و دولت پوشش رسانه ای ورزش و سرگرمی و پوشش های رسانه های دیگر می باشد.
ربات های پرنده توانایی تبدیل شدن به یک ابزار ارزشمند در مدیریت زنجیره های تأمین و عملیات تدارکات را دارند. ظرفیت آنها از راه دور اداره می شود و در آینده به طور خودکار مستقل کار میکنند که این تضمین میکند که تدارکات محصول بیش از پیش مشتری پسند گردد.
این مزایا در گروه های زنجیره تامین فضای باز می تواند حتی در مکان های بزرگ داخلی نیز حاصل گردد زیرا ربات های پرنده اغلب از لحاظ فیزیکی کوچک و دارای عملکرد آسان هستند و می توانند مانند یک هلیکوپتر در هوا شناور باشند
تحویل بسته با استفاده از ربات های پرنده دارای مزایای زیادی نسبت به تحویل وسایل نقلیه زمینی و استفاده از کامیون هاست. از آنجا که ربات های پرنده توسط زیرساخت های تاسیس شده مانند چراغ های راهنمایی و حجم ترافیک متوقف نمیشوند، زمان تحویل می تواند کاهش یابد.
همچنین ممکن است و توان هزینه تعمیر و نگهداری را در یک سیستم تحویل با ربات پرنده کاهش داد زیرا که ربات های پرنده ارزانتر از وسایل نقلیه زمینی هستند و تعمیرش آن نیز آسان است یک ربات پرنده تحویل دهنده با کاهش هزینه برای تحویل و نیز کاهش چشمگیر زمان تحویل ایجاد ارزش می نماید.
برخی سیستم های مبتنی بر ربات های پرنده دارای قابلیتهایی نظیر نظارت و شناسایی نقشه برداری و فتوگرامتری تشخیص اشتباهات اتوماتیک یا وظایف موجودی هستند این سیستمها بر ماموریت های بازرسی تمرکز دارند و در نتیجه در مورد نمونه های مختلف بازرسی مبتنی بر ربات پرنده به عنوان مثال گیاهان، نظارت بر محیط زیست ،جاده ها ،برج های سلولی ،خطوط راه آهن معادن و ساختمان کاربرد دارند.
بدیهی است بسیاری دیگر از سناریوهای بازرسی وجود دارد که در آن روباتهای پرنده قابلیت استفاده دارند مانند خطوط برق ،فضاهای محدود محیط زیست، توربینهای بادی ، جرثقیل و غیره.
روشهای بازرسی سنتی در اکثر این موارد پرهزینه ، وقتگیرک تکراری، کار زیاد و نیاز به تخصص فنی هستند. استفاده از فناوری نوین موجب کاهش و بهبود پروسه های نگهداری و پیشگیری از ریسک می شود.
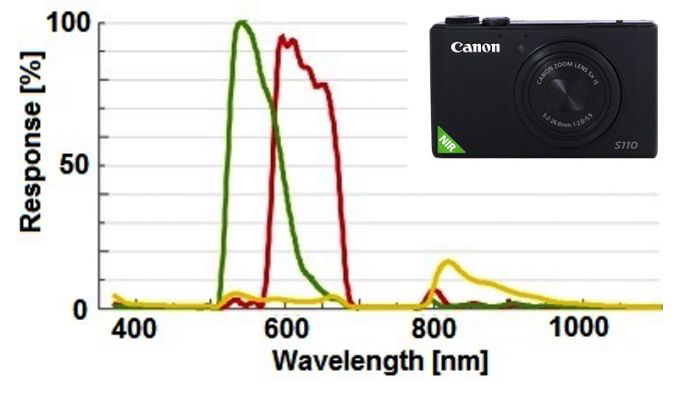
استفاده از ربات پرنده در تشخیص شکست های مختلف ماژول ها بسیار سریعتر و موثرتر از استفاده از روشهای سنتی است به طور خاص اندازه گیری تغییر شکل یک نیروگاه خورشیدی در مقیاس بزرگ با استفاده از تصاویری که توسط یک دوربین دیجیتالی غیر متریک نصب شده بر روی یک ربات پرنده به دست می آیند.
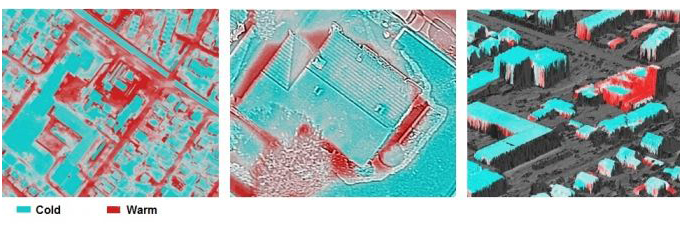
در یک سیستم با پنل های خورشیدی آنچه که بیشتر از همه باید از آن ترس داشته باشیم تاثیر نقاط داغ است با افزایش دما پنل های خورشیدی کمتر کارآمد می شوند و تولید برق کمتری دارند بعضی از مغز ها می تواند موجب شکستن یا حتی جریان معکوس شوند که ممکن است به کل کارخانه خورشیدی آسیب برساند.
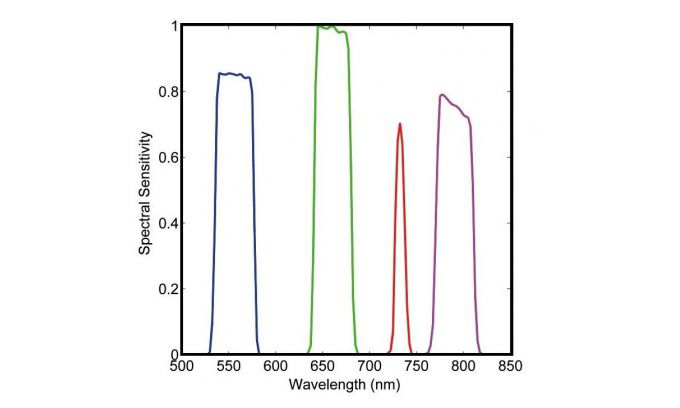
در ربات های پرنده مختلف از دوربین های مختلف تصویربرداری حرارتی و یک دوربین تصویری استفاده می شوند.
پیشرفت های صنعتی و برنامههای توسعه در صنعت گاز با وجود تمام منافعی که برای انسانها به همراه داشته سر منشاء بسیاری از مخاطرات و ریسک ها می باشد نظارت بر گاز های زیست محیطی برای ارزیابی خطر در محیط داخلی( نشت گاز، آتش سوزی،برنامه های استخراج معادن و…)
و خارج از منزل (انتشار گاز های زیست توده زیست محیطی،مطالعات شناسایی عوامل بیولوژیکی و …) ممکن است نیاز به مشاهده طولانی مدت و تعداد زیادی از سنسور ها باشد.
ربات های پرنده می تواند به طور قابل ملاحظهای مجهز به شبکههای حسگر زمین باشند برای این منظور یک نام و ربات پرنده باید سانسورهای قادر و تعیین غلظت های شیمیایی فرار و شناسایی نشت گاز باشد.
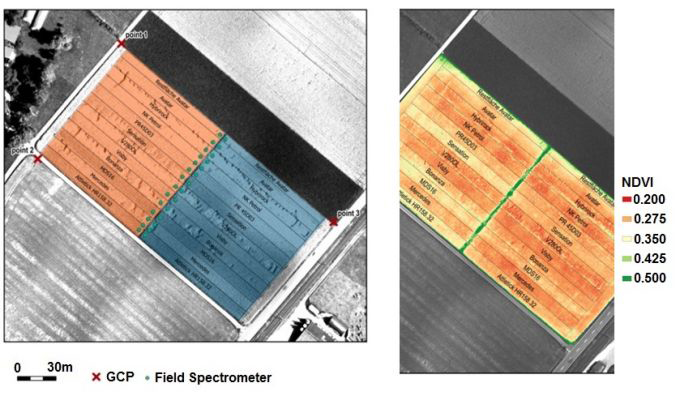
مدیریت و نظارت بر جنگلها و مراتع خصوصاً در مقیاس های وسیع نیازمند استفاده از تکنیک های سنجش از دور برای جمع آوری اطلاعات مورد نیاز است استفاده از ربات های پرنده به ابزاری ارزشمند برای آنالیز و ارزیابی سلامت جنگل ها و بدل شده است.
بر این اساس تمرکز بر ارائه یک سیستم است که بررسی، نقشه برداری شکاف، اندازه گیری ارتفاع جنگل ها، ردیابی آتش سوزی جنگل و حمایت از مدیریت جنگل های فشرده را به شدت تسهیل نماید.

- در دهه اخیر رباتهای پرنده از یک وسیله سرگرمی و تفریحی به یک محصول تجاری و پرکاربرد تبدیل شده و صنایع بسیاری از جمله صنعت کشاورزی را تحت تاثیر خود قرار داده اند. پرواز در ارتفاع پایین و مانور پذیری بسیار بالای ربات های پرنده ها به خصوص نمونه های عمود پرواز باعث می گردد تصاویری که آنها از سطح زمین برداشت می کنند وضوح بالایی داشته و این میزان از تفکیک امکان ثبت پدیده های متنوعی از جمله تشخیص آفات و علفهای هرز تعیین سطح زیر کشت محصولات مختلف پایش اراضی و جلوگیری از تخریب آنها و ارزیابی خسارات به مزارع و باغات در سوانح غیرمترقبه را در فرآیند آنالیز تصاویر به وجود آورد.

- در هنگام حوادث و بلایای طبیعی دسترسی ممکن است سخت باشد و منابع برای تیم عملیات نجات نسبتاً محدود است.قابلیتهای ارتباطی در منطقه هدف ممکن است از دست رفته باشد نقشه های منطقه ممکن است قدیمی باشند دسترسی به مناطق ممکن است به خطر افتاده باشد مثلاً بیانیهها جادههای آبگرفتگی ساختمان های فرو ریخته شده این ترکیبی از عوامل به اعضای کمبود منابع انسانی احساس اضطراب دریافتند یا تماس با افراد مبتلا به عفونت نیاز به یک اقدام سازمان یافته دارد.هواپیماهای بدون سرنشین خودکار میتواند افراد را پرورش داده و اجازه میدهند تا آنها را بر روی وظایف خود متمرکز شوند
- به کارگیری ربات پرنده مجهز به حلقه نجات در سواحل می تواند جان قربانیان را نجات دهد چرا که حلقه نجات سریعتر از نجات غریق ها به فرد غریق می رساند.هنگامی که قربانیانی که حلقه نجات داشته باشند میتوانند تا زمان رسیدن و نجات دهنده ها به اندازه کافی زنده بمانند یک فرایند تحلیلی سلسله مراتبی مشخص نموده است که یک حلقه نجات بند دار، بهترین وسیله شناور برای این کار کرد است.
- ارتقاء مراقبت های پزشکی در کشورهای در حال توسعه از طریق به کارگیری ربات های پرنده حمل کننده خون،واکسن ،داروهای ضروری و برخی تجهیزات پزشکی بخصوص برای مناطق دورافتاده و محروم که فاقد مراکز مجهز پزشکی و جاده های مناسب دسترسی می باشند میسر می گردد.
- در کشورهای توسعه یافته هم بلایای طبیعی می تواند راه های ارتباطی برای اورژانس پزشکی را غیر قابل دسترس نماید در شهرها و در تراکم ترافیک ربات های پرنده سریعتر از هر وسیله دیگری قادر و تحویل خدمات اورژانس به محل سانحه است.
- این پاسخ های سریع بالقوه می تواند باعث آسیب های پزشکی کمتر و نجات جان انسانها گردد.
به زودی ربات های پرنده تحویل بهداشت و درمان به مکان های با دسترسی دشوار در همه جای دنیا به کار گرفته می شود.
- ربات های هوشمند پرنده جهت موقعیت یابی و شناسایی اماکن آسیبدیده و کمک به مصدومان و سوانح طبیعی به کار می روند این پرنده ها به تجهیزات دقیق ردیابی دوربین های دید در شب نیز مجهز هستند می تواند بازرسی را بسیار ساده و کم خطر نموده و سرعت ردیابی را افزایش دهد این ربات ها دارای مزایایی از جمله ضریب ایمنی در عملیات شناسایی و ردیابی مصدومان حتی در شرایط جوی نامساعد،کاهش محسوس هزینه ها،افزایش سرعت ردیابی مصدومان و مناطق آسیب دیده می باشند.
- در هنگام رخداد بلایا از بین رفتن زیرساختها امری بدیهی است به تبع آن امکان دسترسی و کمک رسانی به افراد آسیب دیده و انجام عملیات امداد و نجات با دشواری مواجه میشود استفاده از ربات پرنده به عنوان پشتیبانی وسایل نقلیه زمینی کاربرد دارد چرا که برای تصویربرداری و به دست آوردن اطلاعات از منطقه و مسیر، ربات پرنده دارای انعطاف پذیری و قابلیت است.
موانع و چالش ها

شرکت مترنت که یک شرکت تولید کننده رباتهای پرنده است توضیح میدهد که موانع فنی از قبیل کمبود باتری و مقررات ایالات متحده پرواز ربات های پرنده را فراتر از برد دید اپراتورها ممنوع میکند اگر دستگاهها دارای تکنولوژی جلوگیری از برخورد نباشند
کارکرد مفید ربات های پرنده شامل تحویل اقلام کوچک در مکان های مورد نیاز و با دسترسی دشوار است تحویل به موقع داروهای ضروری خون و واکسن ها در مراقبتهای بهداشتی حیاتی هستند با این حال مکان هایی که نیاز و تحویل وجود دارد ممکن است به دلیل زیرساختهای حمل و نقل ضعیف یا جاده های مسدود شده توسط شرایط آب و هوایی شدید بلایای طبیعی تراکم ترافیک دسترسی دشوار داشته باشند از آنجا که یک ربات پرنده میتواند بر فراز یک جاده غیرقابل دسترس پرواز کند و سازمان های نوآورانه از ربات های پرنده برای تحویل مراقبت های بهداشتی استفاده می کنند
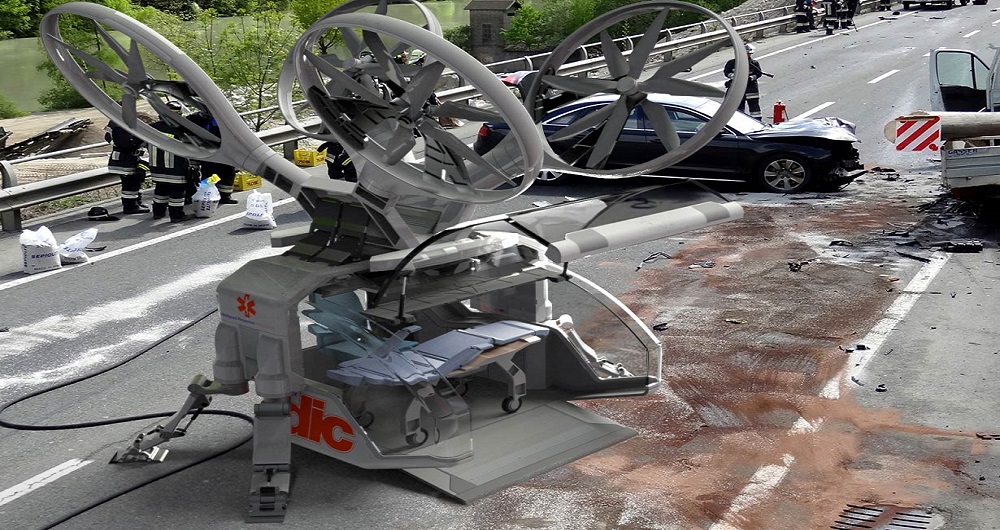
کارکردهای بشردوستانه ربات های پرنده هنگامی که زندگی انسانها در معرض خطر است بسیار مفید خواهد بود به عنوان مثال در نپال پس از زلزله سال ۲۰۱۵ ربات های پرنده به نجات دهنده ها کمک کردند تا بازماندگان را پیدا کنند درمقابل کارکردهای بشردوستانه ربات های پرنده استفاده از آنها برای اعمال مجرمانه مانند تحویل کالای قاچاق به زندانیان شلیک تسلیحات تروریسم و هک کردن وجود دارد و مشاهیر و دیگران نگران هستند که ربات های پرنده آن ها را جاسوسی کنند علاوه بر این صاحبان روبات های پرنده غیر مجاز در مواردی که مربوط به عکس برداری از تصادفات حادثه آتش سوزی و دخالت در پاسخگویی اضطراری هستند مورد آزار قرار گرفته اند در سال ۲۰۱۵ حضور یک ربات پرنده خبری باعث وقفه در عملیات آتش نشانی در حادثه حریق در بزرگراهی در کالیفرنیای جنوبی شد
همچنین رباتهای پرنده از لحاظ و مقررات ناکافی مسائل امنیتی و امنیتی و سوء استفاده از حریم خصوصی مورد انتقاد قرار گرفتند نگرانیهای دیگر این است که مردم می توانند ربات های پرنده را سرنگون کنند و محموله آنها را سرقت کنند.
ربات های پرنده تحویل دهنده با چالشهای خاصی مواجه می گردند این لیست وجود دارد که هزینه تحویل با این دستگاهها از روش حمل و نقل کامیونی و تحویل دستی بیشتر شود همچنین خطر وجود دارد که روبات های پرنده دچار ایراد شوند و باعث جراحت یا خسارت شوند که در نتیجه افزایش مسئولیت را به دنبال دارد این مخاطرات به سادگی قابل اندازه گیری نیست اما آنها نقش مهمی در تعیین نظارت قابلیت اطمینان برای یک سیستم جدید را ایفا می کنند
در یک ربات پرنده تجاری ممکن است هزاران جز و میلیون ها خط نرم افزاری وجود داشته باشد تقریباً هر عنصری که به هر دلیل دچار ایراد شود ممکن است کل سیستم را از کار بیندازد و منجر به اختلال در پرواز کنترل شده یا از دست رفتن وسیله حمل و نقل و ایجاد مسئولیت ناشی از تصادف گردد .منابع شکستها جدید و ناشناخته نیستند یک منشاء وسیعی از شکست. شامل نقض های پنهان ناشی از اجزا در مونتاژ یا نقص های پنهان در قسمت تحویل که هنگام بروز خطا در حین استفاده آشکار می شوند.
منشا دیگر تعامل سیستم با محیط زیست است اثرات ناشی از مه نمکی، باد، تابش و تنش های زیاد آب و هوا ، همراه با گرد و غبار ، آوار،حشرات حیوانات و غیره همه را تحت تاثیر قرار می دهند و در نهایت عملکرد سیستم را ضعیف می کنند.
حرکت ربات های پرنده لزوماً به یک شبکه حمل و نقل ثابت محدود نمی شود بلکه از موانعی که ربات های پرنده در هنگام پرواز با آنها مواجه میشود باید تعیین شوند.
از جمله موانع فیزیکی مانند ساختمان های بلند و کوه ها و مناطق محروم و محدود شدن پرواز برای اهداف ایمنی و امنیتی.
برنامه ریزی مسیر باید در فضا به طور پیوسته انجام شود مادام که با موانعی در پرواز مواجه می گردد با توجه به این که ، دامنه پرواز باتری های پهپادها محدود است ایستگاه های شارژ چندگانه در مناطق شهری مورد نیاز است تا بدون اتمام نیروی عملیات تحویل تکمیل گردد.
آرزوی کنونی خردهفروشان و فروشندگان برای تحویل کالاها از طریق روباتهای پرنده به افراد در محدوده شهری در مراحل ابتدایی می باشد ارائه خدمات تحویل نزدیک و در همه جا حاضر به مشتریان نتیجه میل به بهینهسازی تحویل و رضایتمندی مشتری است که ممکن است حاصلی مغایر با بهینه سازی یا رضایتمندی داشته باشد.
کسانی که در معرض ناوگان هواپیماهای بدون سرنشین قرار دارند که به مجاورت و همسایگی آنها آمدهاند، نیازمند واگذاری غذاهای عمومی شهری هستند تا بتوانند این نوآوری را در اختیار داشته باشند.
مردم ممکن است مجبور شوند راه خود را عوض کنند و همان گونه که در شهر ها راه می روند مواظب باشند نه فقط مواظب دو طرف خیابان قبل از عبور بلکه باید مراقب بالای سر خود نیز باشند سر و صدا ممکن است باعث ایجاد استرس مضاعف در محیط پر استرس کنونی گردد.
حیات وحش و بخصوص پرندگان باید عادت های غریزی خود را تغییر دهند تا اهداف خرد و فروش آن را برای تحویل سریع فراهم کنند
بخشی از هویت یک جامعه روابط اجتماعی است که توسط پیک ها و حامل های تحویل به طور منظم و مستمر حفظ می شود که روابط را با اعضای یک جامعه به عنوان محصول جانبی که طبیعت در این شغل بودن است ایجاد میکند و مستلزم صرف وقت روزانه در یک محله در ارتباط با ساکنان آن است.
تحویل با روبات های پرنده می تواند از نوع دانش جامعه یا به تعبیری این خرده فرهنگ را به عنوان چسب خاموشی جوامع حذف کند و شیوه ایجاد دانش در محیطهای شهری ما را تغییر دهد.
در هنگام اتوماسیون یک سیستم اجتماعی رابطه اجتماعی را خشک و قاطع میکند و رباتهای پرنده از این امر مستثنی نیستند.
ربات های پرنده باید با مردم و با یکدیگر به منظور مذاکره و حرکت در فضای شلوغ تعامل اجتماعی داشته باشند با این حال دانشی که آنها جمعآوری میکنند دارای محتوایی فاقد زمینه تعامل و یا جامعه پذیری خواهد بود.
مسئله دیگر تقاطع بین دادههای رباتهای پرنده و عظیم دادهها است این تمرکز در دو مورد استفاده از ربات های پرنده برای اهداف مدنی اطلاعات مربوط به بحران و کشاورزی دقیق است.
که هیچ کدام از این موارد سبب ایجاد مشکلات حریم خصوصی و مسائل اخلاقی قابل توجهی نمی شوند زیرا آنها بر روی مردم تمرکز ندارند.
ادغام فناوری ربات های پرنده در سیستم های جمع آوری عظیم دادهها مسائل مربوط به حریم خصوصی و اخلاقی مطرح شده توسط ربات های پرنده و عظیمادغام فناوری ربات های پرنده در سیستم های جمع آوری عظیم داده ها مسائل مربوط به حریم خصوصی و اخلاقی مطرح شده توسط ربات های پرنده و عظیم داده ها را افزایش می دهد.
به طور خاص ادغام داده های ربات های پرنده با داده های رسانه های اجتماعی در اطلاعات مربوط به بحران و ادغام اطلاعات ربات های پرنده با داده های هواشناسی و مصرف کنندگان در کشاورزی دقیق مسائل قابل توجهی را در مورد شناسایی تبعیض و برابری و تقسیم دیجیتال ایجاد می کند.
به طور خلاصه می توانیم نتیجه گیری کنیم که ربات های پرنده به طور فزایندهای در حال تبدیل شدن به سیستم های جمع آوری از این داده ها هستند و به عنوان یکپارچگی و فناوری ها و سیستم های اضافی مشکل ساز بودن برنامه های ربات های پرنده به عنوان پر خطر یا کم خطر است.
لازم است که مفاهیم حفظ حریم خصوصی و اخلاقی و همه فناوری های بالقوه را در نظر گرفته مصرف آن تمرکز بر روی ربات های پرنده نداشته باشیم
کلام آخر:
ما مفتخریم اعلام کنیم که فعالیت های ما تنها محدود به کلاس های علمی و آموزشی نمی باشد .
بلکه ما در فونیکس فرصتی را پدید آورده ایم که به کمک آن می توانید در وقت و هزینه خود صرفه جویی کنید و بازدهی را به طور چشمگیر افزایش دهید. زیرا در جامعه امروزی که نیاز ها تغییر کرده اند.
راه حل های قدیمی جوابگوی مشکلات جدید ما نیستند و ما قادر خواهیم بود. با دانش و تخصص خود بهترین راه حل را برای شما به ارمغان آوریم با ارائه ی فعالیتهای صنعتی شرکت فونیکس ساخت و تولید انواع پهپادو هواپیمای بدون سرنشین خدمات پس از فروش تعمیرات ، آموزش پرسنل و … در خدمت شماست.
همچنین با طراحی دلخواه شما در زمینه های صنعتی و تفریحی به صورت اختصاصی (طراحی انواع هواپیما ،بالن و …)شما را همراهی می نمائیم.