مقدمه
رشد فزاینده مناطق شهری و نرخ بالای تغییرات آنها در کنار
و پیچیده بودن برخی ساختارهای شهری و
دشواری تحلیل اطلاعات موثق از این ساختارها
در سطح زمین روشهای نقشهبرداری متداول را به منظور
تهیه و به روز رسانی نقشه های کاداستر از این مناطق با چالش جدی مواجه است.
روشن نوین
اخیرا این روش نوین فتوگرامتری پهپاد برد کوتاه
با غلبه بر برخی مشکلات فتوگرامتری هوایی کلاسیک
به عنوان یک راه حل جدی به منظور تهیه نقشه های توپوگرافی مطرح شده است.
در تحقیق حاضر امکان استفاده از سکوهای بدون سرنشین جهت
و تولید نقشه های کاداستر با مقیاس ۱:۵۰۰ از
مناطق شهری نسبتاً وسیعی ارزیابی گردیده است.
تحلیل جامع بر روی پارامترهای اثرگذار بر دقت و
ویژگیهای اطلاعات سه بعدی تولید شده
از این روش ارائه شده است با توجه به دقت مورد درخواست
این پارامتر ها تحلیل و نهایتاً مقدار بهینه برای آنها انتخاب می شود.
ارزیابی جامعه ای بر روی دقت و قابلیت اعتماد
این روش در نقشه های کاداستر ارائه شده است
به علت وجود مشکل نواحی پنهان اعوجاجات نسبتاً شدیدی
در محل لب ساختمان ها و دیوارها به عنوان مهمترین عوارض شهری مشاهده گردید.
نتایج بهبود چشمگیر دقت ها را نشان داد.
مشاهدات کیفی و ارزیابی
همچنین مشاهدات کیفی و ارزیابی های کمی کارایی های
طرح پرواز مضاعف در مقایسه با طرح پرواز های متداول را نشان داد.
ارزیابی های دقت نشان دادند که با استفاده از
طراحی پرواز مضاعف و بهره بردن تنها ۹ نقطه
کنترل برای مساحت در حدود ۵۰۰ هکتاری
مسطحاتی و ارتفاعی در حدود ۵ سانتی متر دست یافت.
امروزه اطلاعات مکانی یکی از مهمترین ابزارهای تصمیم گیری
در سطوح مختلف یک جامعه محسوب می گردد
اطلاعات مکانی
اهمیت اطلاعات مکانی و کارآیی آن در تسهیل روند
تصمیم سازی به حدی است
که در کشورهای بسیاری در بین سایر اطلاعات
از اطلاعات مکانی به عنوان اطلاعات ویژه یاد میگردد.
اطلاعات کاداستر به عنوان یکی از مهمترین
انواع اطلاعات مکانی محسوب می گردد و
به عنوان یکی از ابزارهای لازم برای رسیدن به
اهداف توسعه پایدار در مرکزیت سیستم مدیریت زمین
هر کشوری قرار میگیرد
اهمیت کاداستر کارآمد زمانی آشکارتر می گردد
که سیستم های مدیریت زمین مبتنی بر آن می توانند
به آسانی حقوق محدودیت ها و مسئولیت های
وابسته به املاک ارزیابی بازار زمین و ملک و
همچنین کاربری زمین را تحت کنترل درآورند.

روش های تهیه نقشه های کاداستر
روش های تهیه نقشه های کاداستر را می توان به دو روش مستقیم و غیر مستقیم دسته بندی نمود:
1- مستقیم
در روش مستقیم ممکن است برخی تغییرات
در وضعیت و موقعیت خطوط مالکیت پس از انجام نقشهبرداری مستند
و منظم نبودن داده های کمی و مکانی
به داده های کیفی نظیر عکس ها و ارتوفتوی یکپارچه
سبب بروز برخی ابهامات و دعوی های حقوق شود.
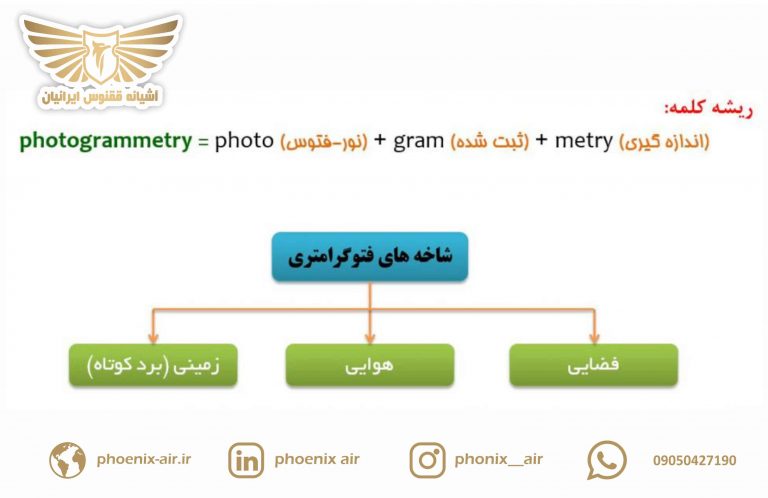
2- روش غیر مستقیم
در مقابل روش مستقیم زمینی روشهای غیر مستقیم
از تکنولوژیهای نوین ترین نظیر فتوگرامتری هوایی
فتوگرامتری فضایی و لیدار بهره میبرند.


نقشه های کاداستر امروزه
در حال حاضر نقشه های کاداستر که با استفاده از تصاویر ماهواره ای
با قدرت تفکیک مکانی بالا یا تصاویر هوایی تهیه می شوند
کوچک مقیاس یا متوسط مقیاس هستند
که توانایی تفکیک مرزهای مالکیت به صورت انفرادی برای هر قطعه را ندارند
و یا دقت در خور نیازهای کاداستر ارائه نمی دهند.
رشد سریع نیازمندی های مربوط به هیچ اطلاعات مکانی
به ویژه در سیستم های کاداستر سبب ایجاد تقاضاهایی
برای ارائه روشهای سریع و کارآمد و نقشه برداری شده است
تصاویر اخذ شده از سکوهای پرنده بدون سرنشین
امروزه به عنوان یک منبع داده با ارزش به منظور تهیه نقشه ها
و اطلاعات مکانی با قدرت تفکیک مکانی بالا به صورت جدی مطرح شده اند.
از آنجایی که فتوگرامتری هوایی برد کوتاه با استفاده
از پرنده های بدون سرنشین را میتوان به عنوان
یک جایگزین ارزانقیمت و سهلالوصول
برای فتوگرامتری هوای کلاسیک دانست
کاربرد های جدید در حیطه فتوگرامتری برد کوتاه را می توان برای آن متصور شد.

عمود پرواز ها و هواپیماهای بدون سرنشین
قابلیت اخذ داده توسط دوربین های رقومی غیر متریک
و پرواز در حالت های دستی نیمه خودکار و خودکار را دارا هستند
و گرامشی با استفاده از پهپاد در مقایسه
با فتوگرامتری سنتی به دلیل استفاده از سکوهای بدون سرنشین
سبک و کوچک بسیار انعطاف پذیر است.

عمود پرواز ها را می توان از هر مکانی پرواز داد
و نیاز به باند پرواز ندارند ارتفاع پرواز آنها در مقایسه
با انواع با سرنشین شان آنها را در تراز پایین تر
از ابرها قرار می دهد
در نتیجه در روزهای ابری نیز امکان اخذ اطلاعات
را خواهند داشت از طرف دیگر ارتفاع پایین سبب
اخذ تصاویر با قدرت تفکیک مکانی و کیفیت محتوا تصویر بالاتر می شود.
بنابراین با استفاده از آنها میتوان اطلاعات سه بعدی دقیق تری از سطح زمین را تولید نمود.
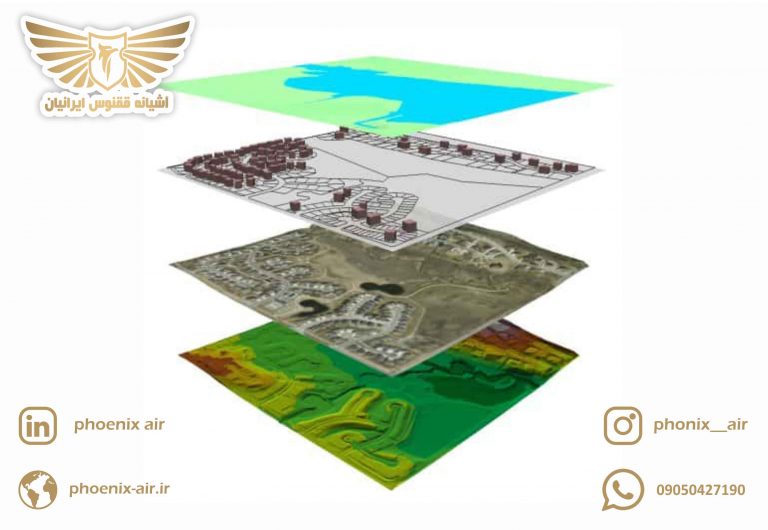
نقشه برداری زمینی و هوایی
با نقشه برداری زمینی می توان به نقشه توپوگرافی یک منطقه
در زمان طولانی و با هزینه زیاد دست یافت
در حالی که در نقشه های استخراج شده
از تصاویر هوایی می توان علاوه بر کاهش زمان و هزینه
به محصولات دیگری نظیر ارتوفتو مدل سه بعدی و ابر نقطه رنگی نیز دست یافت.
در حالی که بسیاری از نیازهای مطرح شده
در زمینه کاربرد و تهیه نقشه های کاداستر فقط
محدود به جنبه دقت اطلاعات سه بعدی تولید شده
برای خطوط مالکیت نیست بلکه صحت و قابلیت اعتماد
این اطلاعات از اهمیت بیشتری برخوردار است.
مسافت های با قدرت تفکیک مکانی و رادیومتریکی بالا
به عنوان یک منبع اطلاعاتی بالاسری
به علت منظم بودن ویژگی های کیفی اطلاعات کمی
در آن میتواند از پیچیدگی های اخذ اطلاعات سه بعدی
در سطح زمین و اشتباهات احتمالی در تشخیص مرزهای مالکیتی بین قطعات بکاهد.
هدف از تحقیقات
هدف از این تحقیق انجام یک مطالعه جامع هدف
از این تحقیق انجام یک مطالعه جامع بر روی امکان استفاده
از پهپاد به منظور تهیه نقشه های کاداستر بزرگ مقیاس است.
در تحقیق حاضر از پهپاد عمود پرواز به منظور
اخذ تصویر از منطقه نیمه شهری به منظور
تهیه نقشه کاداستر به مقیاس ۱:۵۰۰ استفاده شده است.
طراحی پرواز

طراحی پرواز به عنوان یکی از مهمترین و تعیین کننده ترین
مراحل تهیه نقشه به روش فتوگرامتری به شکل ویژه پرداخته شده است
انتخاب دوربین فاصله کانونی در ارتفاع پرواز پوشش های طولی
و عرضی در نوارهای عکسبرداری موقعیت ایستگاه های عکسبرداری
و هندسه نوارهای عکسبرداری در این مرحله و برحسب دقت مورد درخواست
تعیین گردیده اند.
بر اثر این پارامترها بر دقت نهایی تحلیل شده است
مشکل ذاتی فتوگرامتری در اعوجاج ارتوفتوی مناطق شهری
در لبه ساختمان ها و دیوارها بررسی گردید و جهت حل آن
طراحی پرواز ویژه ابتکاری تحت عنوان نوارهای موضوع و متعامد پیاده سازی گردید.
و نتایج حاصل از آن موارد ارزیابی واقع شده است

منطقه مورد مطالعه
منطقه مورد نظر جهت تهیه نقش روستای باستانی
تیز از توابع شهرستان چابهار ایران به مساحت ۴۷۱ هکتار است
که در منطقه کوهپایه ای در ۵ کیلومتری شمال غربی
چابهار و در کنار دریای عمان واقع شده است.
مواد مورد استفاده و ویژگی های آن
سیستم بدون سرنشین مورد استفاده در تحقیق حاضر
یک عمود پرواز ۶ بال بوده است
مجموعه باتری تعبیه شده برای این سیستم
مداومت پرواز ۲۰ دقیقه ای را برای آن فراهم میسازد
استفاده از سیستمهای ناوبری خودکار حرفهای نیز امکان
انجام پرواز در حالت خودکار بر روی یک نقشه یا ارتوفتوی
زمین مرجع را فراهم ساخته است الگوریتم های نوین
این سیستم ها قابلیت و کنترل شاتر دوربین را فراهم کرده است.
بنابراین پس از انجام طراحی پرواز و مشخص شدن
موقعیت مراکز عکسبرداری پرنده قابلیت اخذ تصاویر
در تمامی ایستگاه های عکسبرداری از پیش تعیین شده را به صورت خودکار دارد.
به منظور پایدارسازی دوربین و جلوگیری از تاثیر لرزش
و تکان ها پایدار ثالث محور را در پرنده استفاده گردیده است
با استفاده از پایدار ساز ها می توان تصاویر قائم
و یا با زوایای دورانی دلخواه اخذ نمود و خطای کشیدگی
تصویر در اثر حرکت دوربین را کمینه نمود.
نرم افزار پردازش فتوگرامتری


نرم افزارهای بسیاری تاکنون به منظور پردازش تصاویر هوایی
جهت تولید نقشه توسعه یافته اند
اخیراً این نرمافزارها دانش فتوگرامتری و ماشین بینایی
را هم با هم تزریق نموده و تا حدود زیادی مختص پردازش تصاویر هوایی برد کوتاه
اخذ شده توسط دوربین های رقومی غیر متریک هستند.
این نرم افزارها از روش موسوم به ساختار از حرکت استفاده می کنند
برخی از این نرم افزار ها به صورت منبع باز و رایگان منتشر شده اند
نظیر، Bunder and CMVS و Apero and Mic-mac
نرم افزار نرم افزار Agisoft photoscan
در تحقیق حاضر از نرم افزار Agisoft photoscan
به عنوان یکی از کارامد ترین انواع این نرم افزار ها استفاده شده است
این نرم افزار بر پایه تکنیک بازسازی سه بعدی چند منظری عمل می کند
و سطح اتوماسیون بالا برخوردار است.
اگرچه الگوریتم دقیق عملکرد این نرم افزار
تاکنون به صورت کامل منتشر نشده است
اما گام های اساسی آن کاملاً متداول و قابل درک هستند
این گامها مبتنی بر الگوریتم های استاندارد
و منتشر اگرچه الگوریتم دقیق عملکرد این نرم افزار
تا کنون به صورت کامل منتشر نشده است
اما گام های اساسی آن کاملاً متداول و قابل درک هستند
این گامها مبتنی بر الگوریتم های استاندارد و منتشر شده هستند
و از لحاظ عملکرد در مراحل اجرا مشابه سایر نرمافزارهای دیگر هستند.
نرم افزار امکان استفاده و یا عدم استفاده از برخی از
این پارامترها را توسط کاربر فراهم نموده است
که از آنجایی که دانش چندانی در خصوص نوع خطاهای موجود
در فضای تصاویر وجود ندارد ممکن است
استفاده از تمامی این پارامتر را منجر به بروز خطای open-parametrization
شود.
بنابراین تنها از طریق آزمون و خطا می توان از موثر بودن
و یا مخرب بودن این پارامتر ها اطمینان حاصل نمود.
الگوریتم سرشکنی دسته اشعه
سرشکنی دستگاه اشعه برای کل شبکه فتوگرامتری
بر اساس نقاط متناظر یافت شده در محدوده پوشش مشترک تصاویر
توسط الگوریتم سرشکنی دسته اشعه
برای کل شبکه فتوگرامتری بر اساس نقاط متناظر یافت شده
در محدوده پوشش مشترک تصاویر توسط الگوریتم با اندکی بهبود انجام می گیرد
نقاط متناظر اشتباه بر اساس نتایج سرشکنی
کمترین مربعات حذف می شوند و سرشکنی دسته اشعه
برای نقاط باقیمانده تکرار می شود.
چنانچه مختصات موقعیت دوربین توسط جی پی اس
در لحظه عکس برداری برای هر تصویر ثبت گردد
از این مختصات ها به دو منظور استفاده می شود
کاهش زمان جستجو برای یافتن نقاط متناظر
در عکس های دارای همپوشانی و فراهم کردن
امکان زمین مرجع سازی تقریبی ابر نقاط کم پشت متناسب
با دقت مشاهده کدهای گیرنده جی پی اس.
درنهایت نیز تبدیل سیستم مختصات مدل سه بعدی
به سیستم مختصات زمینی با استفاده از نقاط کنترل زمینی انجام می پذیرد.
طراحی پرواز
در یک پروژه فتوگرامتری جهت دستیابی به دقت های مطلوب
در استخراج مختصات سه بعدی بایستی یک ترکیب هندسی قوی
برای شبکه فتوگرامتری انتخاب نمود.
اندازه شبکه فتوگرامتری در مرحله طراحی پرواز تعیین میگردد
طراحی پرواز را میتوان مهمترین بخش یک پروژه فتوگرامتری دانست
که به غیر از نوع مدل ریاضی فتوگرامتری
و پارامترهای آن تقریباً دقیقه فاکتورهای تاثیرگذار
بر دقت نهایی در این مرحله تعیین می شوند.
طراحی پرواز کاملا وابسته به نوع و مقیاس نقش مورد درخواست
و همچنین ویژگی های منطقه به لحاظ نوع عوارض و توپوگرافی آن میباشد.
نوع دوربین از نظر فاصله کانونی و زاویه گشایش و سایر تنظیمات
آن به همراه ویژگی های پرواز نظیر رن های پرواز
و موقعیت ایستگاه های عکسبرداری ارتفاع پرواز همپوشانی طولی
و عرضی عکس ها در این مرحله تعیین می گردند.
به طور کلی در یک ارتفاع پرواز ثابت با افزایش فاصله کانونی
دوربین ابعاد جی اس دی کاهش یافته
و در نتیجه رزولوشن مکانی افزایش می یابد
از طرف دیگر افزایش فاصله کانونی برای یک دوربین به جهت ثابت ماندن
ابعاد سنجنده سبب کاهش اثر نواحی پنهان میشود.
مشکلات1 و راه حل
نواحی پنهان از بزرگترین مشکلات فتوگرامتری به خصوص
در مناطق شهری هستند و سبب بروز اعوجاج در لبه ساختمان ها و دیوارها می گردد.
از طرف دیگر با افزایش فاصله کانونی تصویر سطح کوچکترین
را بر روی زمین پوشش خواهد داد
و در نتیجه تعداد عکس ها افزایش خواهد یافت
و در تحقیق حاضر با توجه به در اختیار بودن
لنزهای با فاصله کانونی ۱۲ ۱۶ و ۲۰ میلیمتری بزرگترین
آنها ۲۰ میلیمتری استفاده گردید.
با ثابت ماندن فاصله کانونی کاهش ارتفاع پرواز
سبب افزایش مقیاس در نتیجه کاهش ابعاد GSD می شود.
مشکلات2 و راه حل
از طرف دیگر عکسهای که از ارتفاع پایین تر اخذ می شوند
که کوچکتری از زمین را پوشش خواهند داد
و در نتیجه به منظور حفظ پوشش های طولی و عرضی بایستی
فاصله بین مراکز عکسبرداری و محورهای پرواز را کاهش داد
که این مسئله منجر به افزایش عملیات با ثابت ماندن
فاصله کانونی کاهش ارتفاع پرواز سبب افزایش مقیاس
در نتیجه کاهش ابعاد GSD می شود.
از طرف دیگر عکسهای که از ارتفاع پایین تر اخذ می شوند
که کوچکتری از زمین را پوشش خواهند داد
و در نتیجه به منظور حفظ پوشش های طولی و عرضی
بایستی فاصله بین مراکز عکسبرداری و محورهای پرواز را کاهش داد
که این مسئله منجر به افزایش عملیات پرواز تعداد عکس ها میشود.

مشکلات3 و راه حل
تصاویری که از یک ارتفاع یکسان از سطح زمین اخذ شدند
تقریباً دارای ابعاد GSD یکسان هستند
مزیت یکسان بودن ابعاد جی اس کیفیت بهتری انجام خواهد شد
تحقیقات حاضر
در تحقیق حاضر با توجه به اینکه عملیات پرواز به صورت تدریجی
و هر بار از نقاط مختلفی از سطح زمین در منطقه انجام میگرفت
در نتیجه مبنای ارتفاع پرواز در هر مرحله از برخاستن پرنده نقطهای است
که پرونده از آن پرواز را شروع میکند تا مقیاس با کیفیت بهتری انجام خواهد شد
در تحقیق حاضر با توجه به اینکه عملیات پرواز به صورت تدریجی
و هر بار از نقاط مختلفی از سطح زمین در منطقه انجام میگرفت
در نتیجه مبنای ارتفاع پرواز در هر مرحله از برخاستن پرنده نقطهای است
که پرنده از آن پرواز را شروع میکند تا مقیاس همه تصاویر تقریباً یکسان باقی بماند
با افزایش همزمان و متناسب ارتفاع پرواز و فاصله کانونی پارامترهای GSD
و سطح پوشش زمینی تصویر ثابت باقی میمانند
اما قدرت تفکیک مکانی واقعی تصویر حفظ نخواهد شد
این مسئله به قدرت تفکیک اپتیکی عدسی دوربین
شرایط غذای بین دوربین و زمین و شرایط نوری بستگی دارد
با دور شدن از سطح زمین سطح نوع
و میزان تاریخی تصاویر افزایش مییابد
کیفیت پایین تصاویر دقت استخراج نقاط عوارض از تصاویر
و همچنین فرآیند تناظریابی را مخدوش میکند
در نتیجه برای افزایش ارتفاع پرواز محدودیتهایی وجود دارد.
قاعده کلی
قاعده کلی دقت نتایج فتوگرامتری پهپاد
برای مختصات مسطحاتی دوبرابر ابعاد جی اس دی
و برای مولفه ارتفاعی سه برابر ابعاد جی اس دی است.
با توجه به اینکه در این تحقیق هدف تهیه نقشه
با مقیاس ۱:۵۰۰ بود
و مطابق استانداردهای موجود برای این مقیاس بیشینه
خطای مسطحاتی قابل قبول برای این مقیاس ۱۰ سانتیمتر می باشد.
در نتیجه با در نظر گرفتن رابطه ذکر شده به این ابعاد جیاسپی
و خطاها ابعاددر نتیجه با در نظر گرفتن رابطه ذکر شده
به این ابعاد جیاسپی و خطاها ابعاد جی اس پی طراحی شده
برای این پروژه برابر ۴ سانتیمتر در نظر گرفته شده است.
به طور کلی در یک بلوک فتوگرامتری
هنگامی که تصاویر دارای نواحی مشترک بزرگتر باشند
و استحکام هندسی در مرتب سازی تصاویر داخل بلوک افزایش یافته
و همچنین نقاط متناظر بیشتری استخراج می گردد.
و در نتیجه سبب افزایش افزونگی داده میشود.
افزونگی
افزونگی داده برای تعیین موقعیت یک نقطه سه بعدی
با استفاده از مشاهدات تصویری در فتوگرامتری امکان شناسایی
و حذف نقاط متناظر اشتباه کشف شده توسط الگوریتم تناظریابی
را به صورت کارآمدتری فراهم میکند.
از طرف دیگر تقاطع با تعداد کمتر از سه اشعه نوری عبور کننده
از نقاط متناظر دقت مطلوبی را به همراه ندارد.
ترکیب چندین اندازه گیری از تصاویر با همپوشانی زیاد
و هندسه تقاطع مناسب از زوایا و مناظر مختلف سبب افزایش
دقت نقاط سه بعدی تولید شده خواهد شد .
به همین دلیل گسترش بلوک فتوگرامتری در حد یک نوار
به خارج محدوده مورد درخواست برای نقشه سبب افزایش
دقت برای محدوده مورد درخواست خواهد شد.
چراکه در نوارهای حاشیه برای زوایا و منظرهای خارج از بلوک
ایستگاههای عکسبرداری وجود ندارد
و این ضعف هندسه عکسبرداری در نوارهای حاشیه خواهد شد
که با این تمهید مشکل برای محدوده مورد نظر داخل بلوک برطرف میشود.
میزان همپوشانی
از طرف دیگر جهت کاهش نواحی پنهان بخصوص
در مناطق شهری و افزایش تراکم و جزئیات ابر نقطه
و در نتیجه کامل بودن ارتوفتو به خصوص
در لبه ساختمان ها و دیوارها در مناطق شهری بایستی
همپوشانی ها را مقدار بزرگی در نظر گرفت.
بنابراین میزان همپوشانی به نوع زمین و عوارض آن نیز بستگی دارد
هرچه منطقه ذوعارضه و دارای توپوگرافی
و تغییرات ارتفاعی شدیدتری باشد مقدار همپوشانی
را بایستی بزرگتر در نظر گرفت
بنابراین به منظور تهیه نقشه های کاداستر
از مناطق شهری نیاز به هم پوشانی های نسبتاً بالاتری داریم
در تحقیق حاضر میزان همپوشانی ها
در راستای طولی برابر ۷۵ درصد
و در راستای ارزشی ۶۰ درصد در نظر گرفته شد
با این پوششها فرکانس تمامی نقاط واقع در داخل بلوک حداقل برابر ۸ خواهد بود.
مشکلات مجود در ارتوفتوی
اعوجاج و جابجایی ها در لبه ساختمان ها و دیوارها
به طور کلی در محل تغییرات ارتفاعی شدید
یکی از بزرگترین مشکلات موجود در ارتوفتوی مناطق شهری است.

این مسئله به دلیل مشکل نواحی پنهان
در بخشی از ناحیه ای که نسبت به دید سنجنده مخفی است
رخ می دهد .
در نتیجه در ابر نقاط مناطق شهری در پیرامون ساختمان ها
مقداری گپ وجود دارد میزان این گپ به ارتفاع پرواز فاصله
کانونی و همپوشانی طولی و عرضی تصاویر بستگی دارد.
و با تنظیم بهینه این پارامترها می توان مقدار آن را کاهش داد
اما قابل حذف کردن نیست این مسئله در مناطق با ساختمان های
مرتفع و پیچیده شهری از اهمیت بسیار زیادی برخوردار است
اثر نواحی پنهان نهایتاً منجر به بروز خطای نگاشت مضاعف می شود
این مسئله سبب بروز خطا در لبه ساختمان ها
و دیوارها که مهمترین عوارض در نقشههای کاداستر هستند میشود
و ممکن است کارآمدی فتوگرامتری این مسئله سبب بروز خطا
در لبه ساختمان ها و دیوارها که مهمترین عوارض
در نقشه های کاداستر هستند میشود و ممکن است
کارآمدی فتوگرامتری به منظور تهیه نقشه های کاداستر
از مناطق شهری را با چالش جدی مواجه سازد
راه حل
در تحقیق حاضر طراحی پرواز ابتکاری و ویژهای
به منظور مقابله با مشکل اعوجاج لبه ها تحت عنوان
و نوارهای مضاعف و متعامد پیادهسازی گردید .
در واقع برای اینکه مشکل نواحی پنهان تا حدود زیادی مرتفع گردد
نمایش ساختمان ها بایستی در هر چهار جهت :
شمال جنوب شرق و غرب رویت پذیر باشند.
همانطور که در شکل مشاهده می شود

طراحی نوارهای پرواز مضاعف سبب افزایش دو برابری مشاهدات تصویری در فرایند بازسازی سه بعدی می شود
به نحوی که با پوشش های ذکر شده برای این تحقیق فرکانس هر نقطه گره ای حداقل برابر ۱۶ خواهد بود
و همچنین وجود اشعههای نوری تصویر کننده از زوایا
و منظره های مختلف کیفیت هندسه تقاطع را در محاسبات تقاطع فضایی به نحو مناسبی تضمین خواهد کرد.
پروژه فتوگرامتری
در پروژه های فتوگرامتری برد کوتاه جهت غلبه بر مشکل بروز وابستگی میان
و پارامترهای توجیه داخلی و خارجی در خود کالیبراسیون دوربین معمولاً اخذ یک تصویر با زاویه دورانی ۹۰ درجه حول محور دورانی نسبت
به عکس اصلی در هر ایستگاه عکسبرداری توصیه می شود.
رعایت این مسئله دقت های قابل دسترسی را برآورد پارامترهای توجیه داخلی
و خارجی و پارامترهای اضافی و همچنین مختصات شیئی نقاط گره ای به مقدار قابل ملاحظهای افزایش خواهد داد.
طراحی پرواز مضاعف و متعامل ارائه شده در این تحقیق می تواند
در هر ایستگاه عکسبرداری دو تصویر با زوایای رول در حدود ۹۰ درجه در اختیار قرار دهد
بنابراین یکی از نقاط قوت طراحی های نوار پرواز مضاعف تقویت استحکام هندسه شبکه عکسبرداری می باشد.
مهمترین مزیت طراحی نوارهای مضاعف که در این تحقیق بر روی آن تاکید شده است
حذف نواحی پنهان با رویت پذیر نمودن تمامی نماهای ساختمان ها در تصاویر
و در نتیجه جلوگیری از خطاها و اعوجاج طلبه و ساختمانها و دیوارها در ارتوفتو می باشد.
ضعف و طراحی پرواز مضاعف نیز دو برابر شدن تعداد عکسهای پروژه و در نتیجه افزایش هزینه های محاسباتی
و زمان پردازش داده ها می باشد و در انتها نیز استفاده از سامانه های پرواز خودکار انجام پرواز
و اخیرا تصاویر در موقعیت های از پیش تعیین طراحی شده در حد دقت و مشاهدات کد گیرنده های gps را به صورت خودکار تضمین می کند.